|
Automatisierungssysteme - Prozeßrechner - Roboter
Automatisierungsanlagen werden zur Lösung umfangreicher und vielfältiger
Automatisierungsaufgaben eingesetzt. Die Geräte und Einrichtungen
übernehmen dabei Funktionen der Informationsgewinnung, -verarbeitung,
-nutzung, -übertragung und der -ein- und -ausgabe. So spielte auch
die Automatisierungstechnik neben der Datenverarbeitungs- und Rechentechnik
eine wesentliche Rolle. Es gab Prozeßrechner, SPS, CNC-Maschinen
und Roboter.
ursadat 5000
ursadat 5000 war ein für den Einsatz als Prozeßrechner
angepaßtes und erweitertes K 1520 - System vom VEB Elektro-Apparate-Werk
Treptow. Es war modular aufgebaut und umfaßte neben dem K 1520 -
System folgende Module:
-
Prozeßein- und Ausgabemodule
-
Stromversorgungsüberwachung und Netzausfallanalysatoren
-
schnelle serielle Interfacemodule
-
Bedien- und Anzeigemodule, Zentraler Überwachungsbaustein
Weiterhin gehörte zum System das Bediengerät ursatron 5000
zur prozeßorientierten Bedienung und die Serviceeinheit ursatron
5000 für die Prüfung, Inbetriebnahme und Wartung der Anwendersysteme.
Die Systemsoftware bestand aus mehreren Komponenten
-
Echtzeitsteuerprogramm EIEX 1521 (vom VEB Kombinat Robotron)
-
Ein- / Ausgabemodule
-
Bedien- und Kommunikationsmodule
-
Standardunterprogramme (Arithmetik, Zeichenkettenverarbeitung, Konvertierung)
Automatisierungssystem audatec
Der VEB Geräte- und Regler-Werk Teltow entwickelte auf der Basis
von ursadat 5000 und Eigenentwicklungen das universelle, mikrorechnergeführte
Automatisierungssystem audatec.
audatec ermöglichte den Aufbau von drei Funktionsebenen
-
Informationsverarbeitungsebene
Hier befanden sich die Basiseinheiten. Sie standen in direktem
Kontakt mit den Meß- und Stelleinrichtungen und übernahmen das
Erfassen von Prozeßsignalen, deren Verarbeitung und die Ausgabe von
Stellsignalen an die Stelleinrichtungen. Für Störungsfälle
waren Reservebasiseinheiten vorgesehen.
-
Prozeßleit- und Kommunikationsebene
Diese Ebene setzte sich aus mikrorechnerbestückten Bedien-
und Anzeigepulten sowie der Datenbahnsteuerstation zusammen. Die Bedienpulte
waren als Sitzarbeitsplätze in den Warten installiert. Von hier aus
wurde die Anlage bedient, überwacht und Änderungen an der Funktion
des Prozeßleitsystems vorgenommen. Drucker ermöglichten die
Ausgabe von Protokollen.
-
Betriebsleit- und Dispatcherebene
Der Einsatz übergeordneter Wartenrechner führte zur
Betriebs- und Dispatcherebene. Diese Rechner hatten Zugang zu ausgewählten
Daten des Prozeßleitsystems und übernahmen höhere Aufgaben,
z.B. zur Prozeßbilanzierung, Prozeßoptimierung, Koordinierung
und Informationsausgabe.
Hauptsächliche Systembestandteile waren
-
der Rechnerkern
-
das Prozeßinterface
-
das serielle Zwischenblockinterface (500 kBaud bis 3km Entfernung und bis
zu 254 Stationen)
-
das Mensch - Anlage - Interface (Bildschirm, Tastatur)
In EPROM's war das Basismodulpaket gespeichert und enthielt Globalfunktionen
wie Meßwertverarbeitung analoger Größen, binärer
Größen und für Impuls- / Zählgrößen und
die Regelung. Mit Hilfe von Verknüpfungslisten, die auf RAM-Speichern
abgelegt wurden, waren die Basismodule miteinander verbunden.
SPS ursalog 5010 / 5020
Der VEB Elektro-Apparate-Werk Berlin Treptow
entwickelte die speicherprogrammierbaren Steuerungen ursalog 5010 und 5020.
Als Steuer- und Verarbeitungseinheit wurde der U 880 eingesetzt.
Zur Programmierung wurde PROLOG 1 bzw. 2 eingesetzt und gestattete dem
Anwender, vom Ablaufgraphen ausgehend, eine einfache Notation in Form von
Makros.
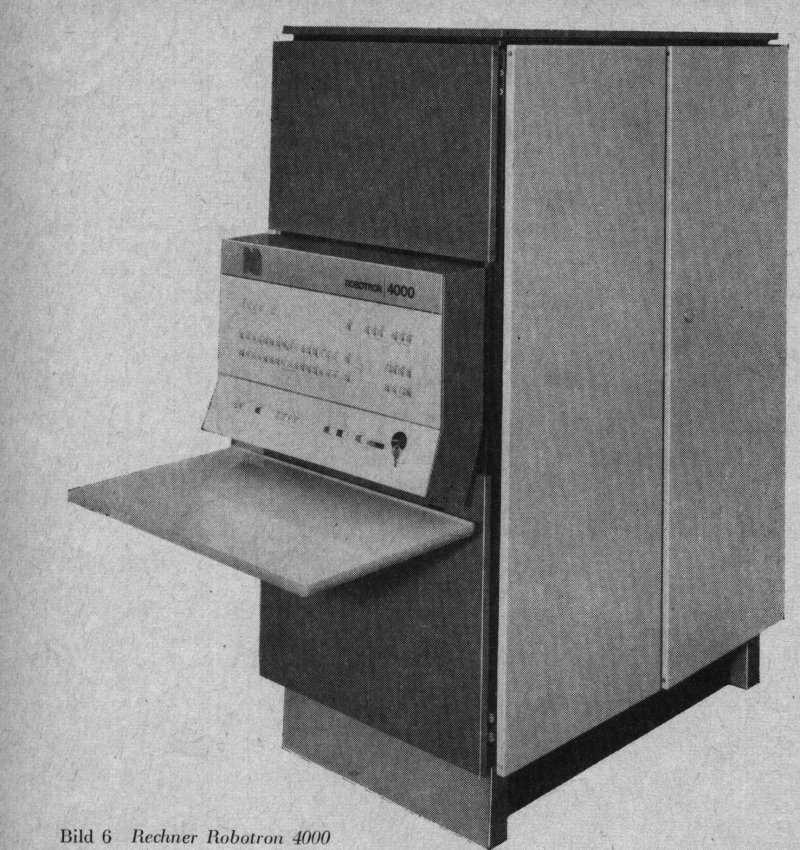
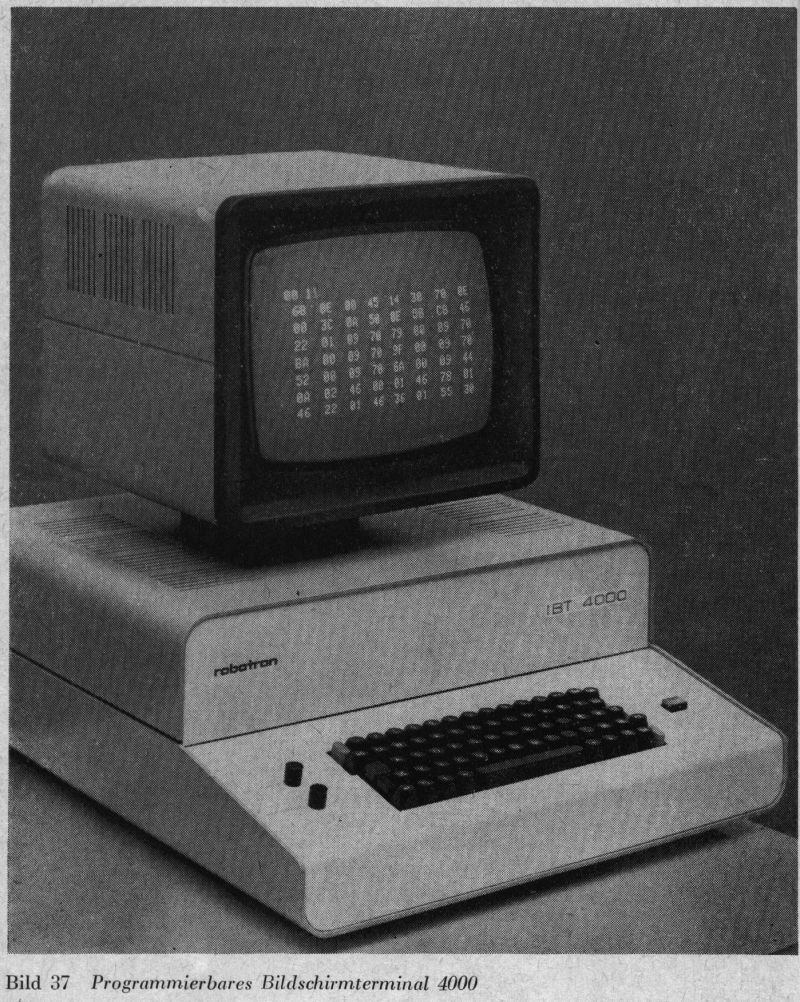
Rechnerfamilie robotron 4000
Mitte der 60er Jahre wurden für Anwendungsfälle wie
-
wissenschaftlich-technische Berechnungen
-
Stapelverarbeitung von Daten
-
Prozeßsteuerung
spezielle Anlagen gebaut. Mit dem Beginn der Rationalisierungsbestrebungen
wurden universelle Zentraleinheiten entwickelt, die über universelle
Anschlußmöglichkeiten und für den Anwendungszweck entsprechende
Peripherie zur Verfügung stellten. In diese Kategorie fallen die Rechner
der Familie robotron 4000
-
robotron 4000
-
robotron 4200 und
-
robotron 4201.
Hauptanwendugsgebiete
Als Hauptanwendungsgebiete kamen in Frage
-
Echtzeit-Überwachung und -Steuerung technischer Prozesse
-
Automatisierte Produktionssteuerung
-
Automatisierte Steuerung von Fließprozessen sowie von Stückprozessen
-
Echtzeit-Überwachung und -Steuerung
-
Labor- und Prüffeldautomatisierung
-
Wissenschaftlich-technische und ökonomische Berechnungen
-
Informationsverarbeitungssysteme
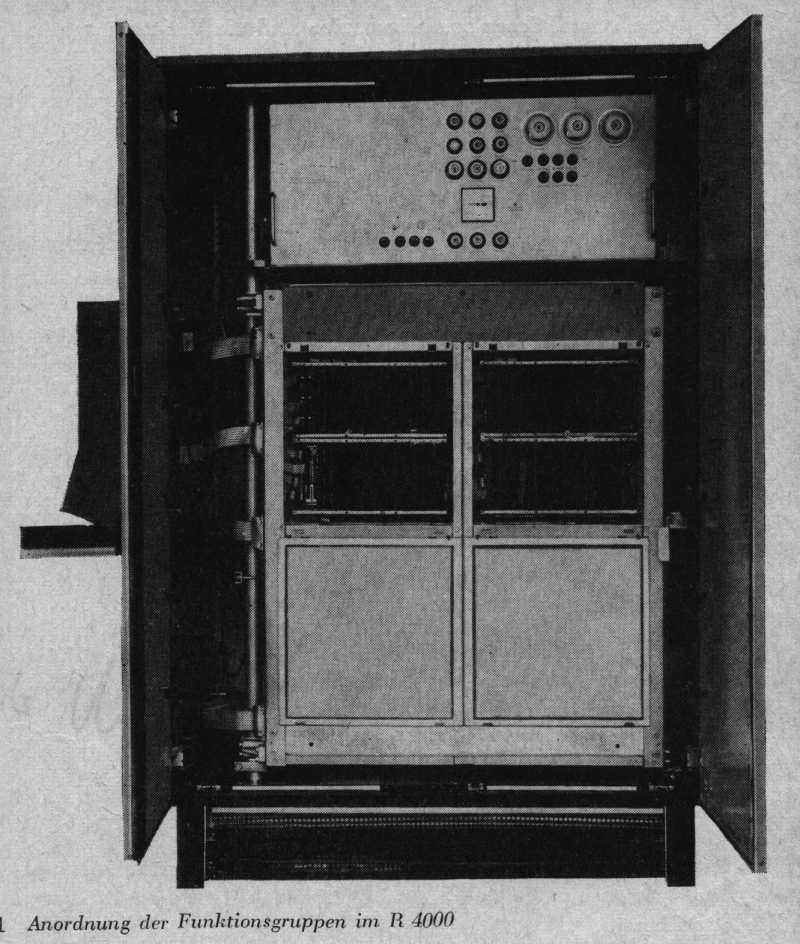
Gerätefamilie
robotron 4000
| Rechnertyp |
Allzweck-Digitalrechner, mit Möglichkieten des Echtzeitbetriebes |
| Schaltungstechnik |
monolithische intergrierte Schaltung in TTL-Logik |
| Arbeitsweise |
parallel, Festkomma |
| Adressierung |
direkte und indirekte Adressierung, Indexierung |
| Wortlänge |
16 Bit |
| Zahlendarstellung |
Zweierkomplement |
| Hardware-Register |
14 |
| Hauptspeichertyp |
Ferritkernspeicher |
| Anzahl Befehle |
96 |
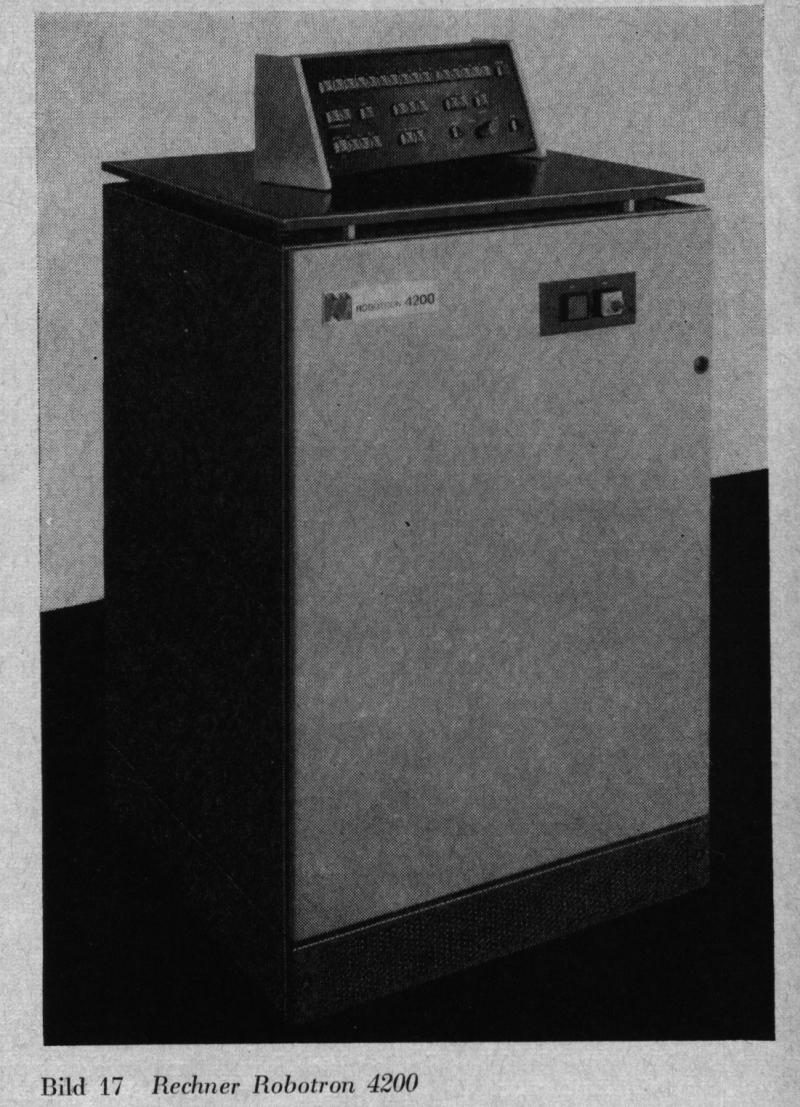
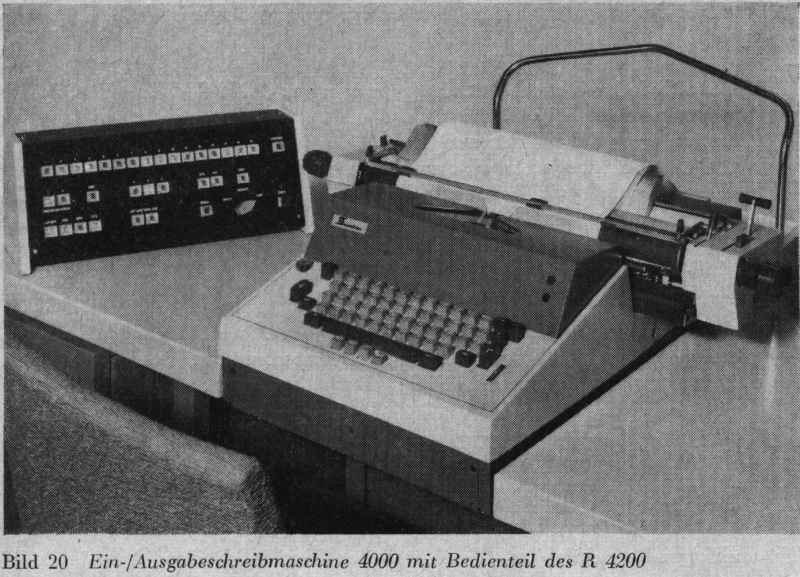
robotron 4200
Speziell für die Einsatzgebiete Labor- und Prüffeldautomatisierung
sowie Steuerung von Werkzeugmaschinen und die wissenschaftlich-technische
und ökonomische Berechnung wurde der Rechner R 4200 gebaut. Logisch-funktionell
ist der R4200 eine Abrüstung des R 4000. Der Befehlsvorrat von 50
Befehlen stellt eine Untermenge der R 4000 - Befehle dar. Weiterhin wurden
die Anschlußmöglichkeiten gegenüber dem R 4000 erweitert.
| Rechnertyp |
Allzweck-Digitalrechner, mit Möglichkieten des Echtzeitbetriebes |
| Schaltungstechnik |
monolithische intergrierte Schaltung in TTL-Logik |
| Arbeitsweise |
parallel, Festkomma |
| Adressierung |
direkte und indirekte Adressierung, Indexierung |
| Wortlänge |
16 Bit |
| Zahlendarstellung |
Binärsystem, Zweierkomplement |
| Hardware-Register |
7 |
| Hauptspeichertyp |
Ferritkernspeicher |
| Anzahl Befehle |
96 |
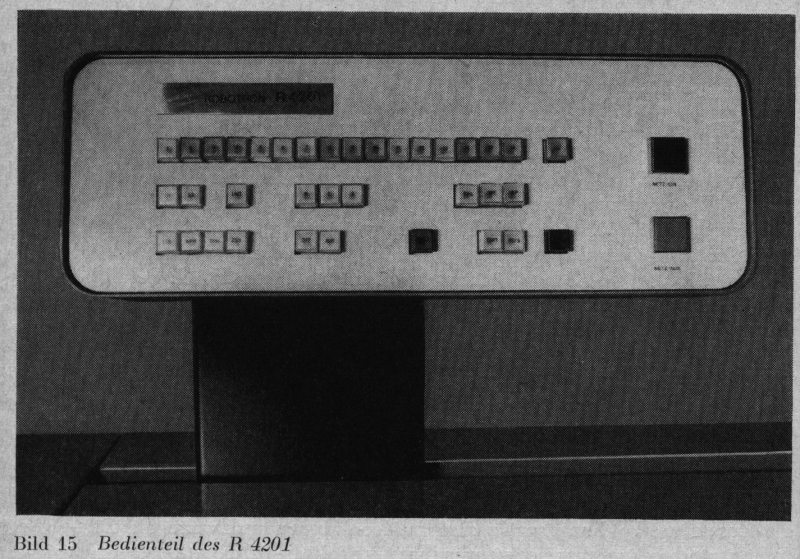
robotron 4201
Der robotron 4201 stellte das Kernstück des Kleinrechnersystems
KRS 4201 dar. Er war eine Weiterentwickliung des R 4200. Er wurde in das
ESER-Konzept unter der Bezeichnung EC 8404 eingeordnet.
Der Befehlssatz unfaßt 50 Befehle und bildet eine Untermenge der
Befehle des R 4000 und sind identisch mit den Befehlen des R4200.
| Rechnertyp |
Allzweck-Digitalrechner, mit Möglichkieten des Echtzeitbetriebes |
| Schaltungstechnik |
monolithische intergrierte Schaltung in TTL-Logik |
| Arbeitsweise |
parallel, Festkomma |
| Adressierung |
direkte und indirekte Adressierung, Indexierung |
| Wortlänge |
16 Bit |
| Zahlendarstellung |
Binärsystem, Zweierkomplement |
| Hardware-Register |
8 |
| Hauptspeicher |
Ferritkernspeicher |
| Befehle |
53 |
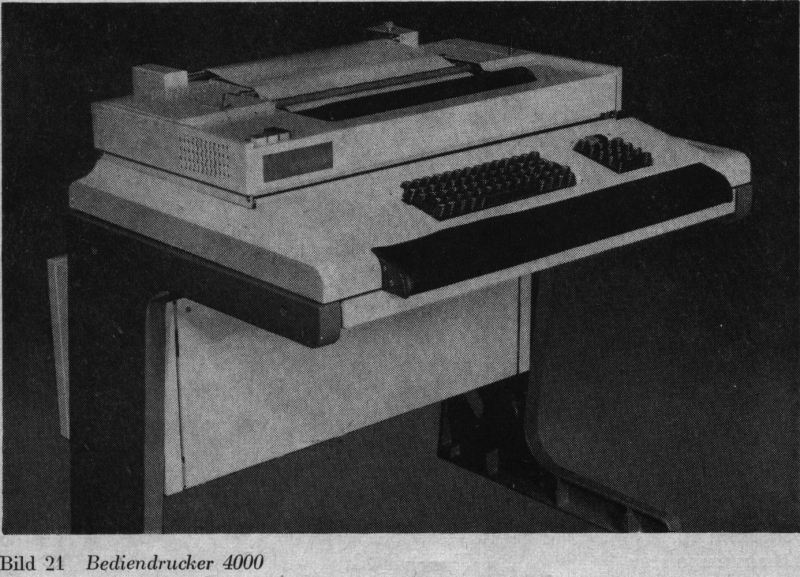
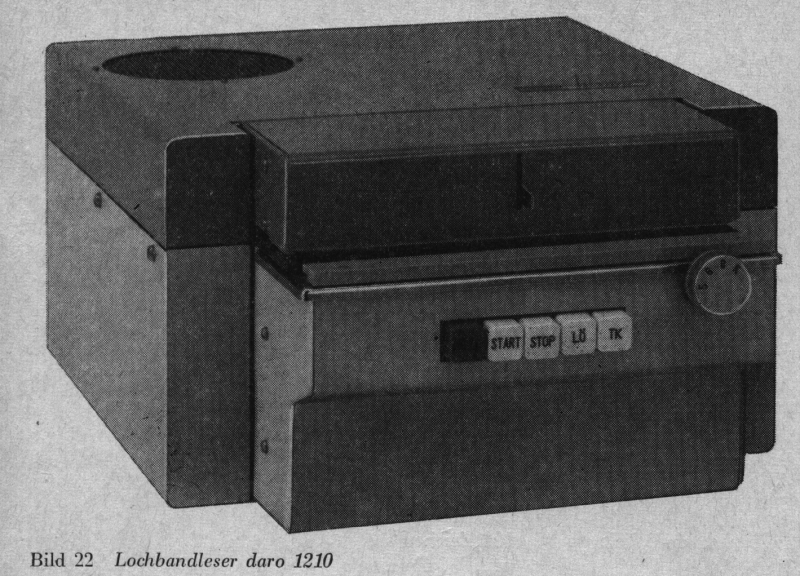
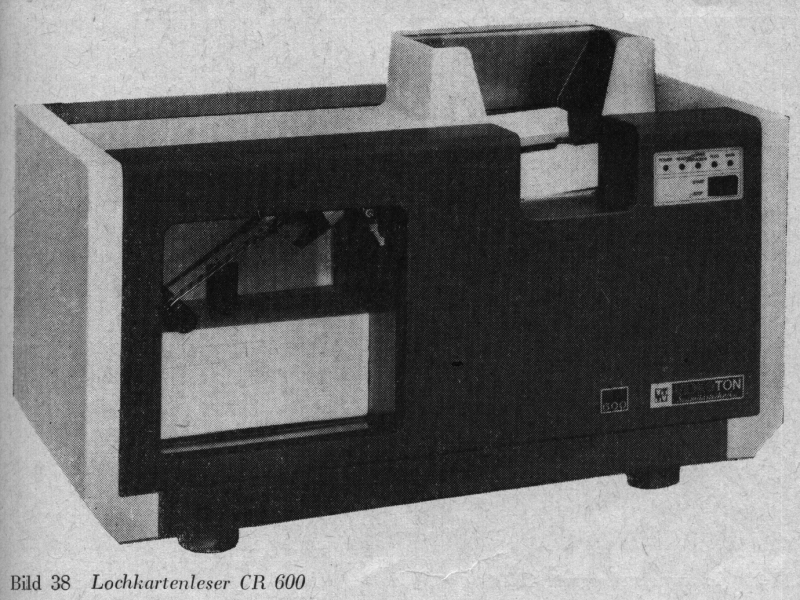
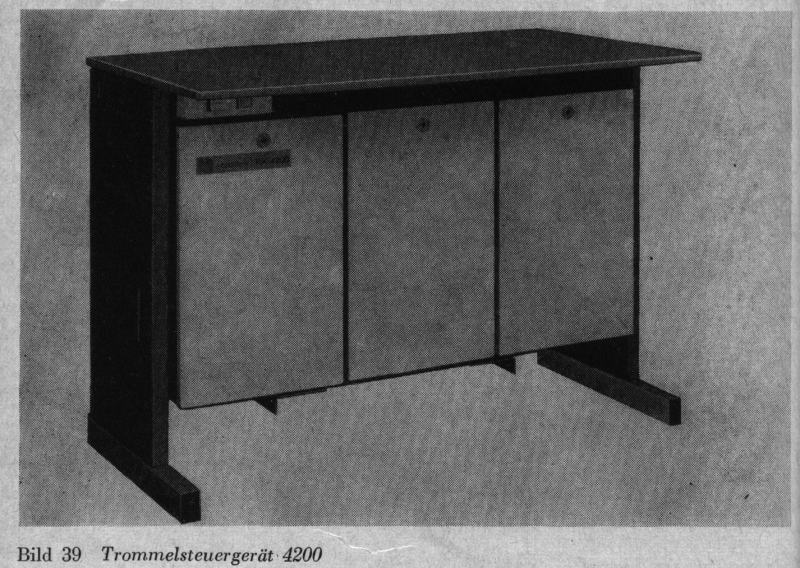
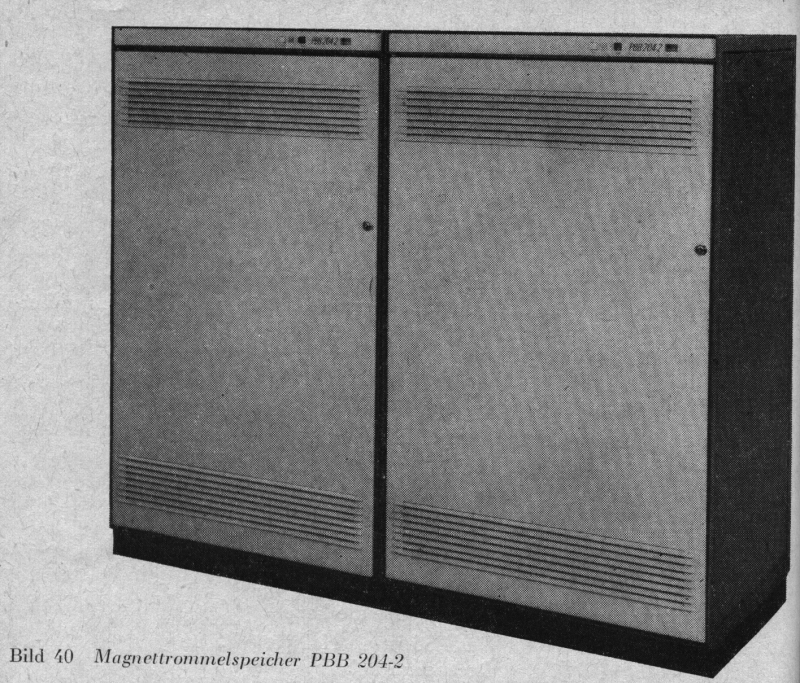
Peripheriegeräte
Die Menge der Peripheriegeräte war sehr vielfältig. Sie umfaßte
-
Ein- / Ausgabeschreibmaschinen,
-
Bediendrucke,
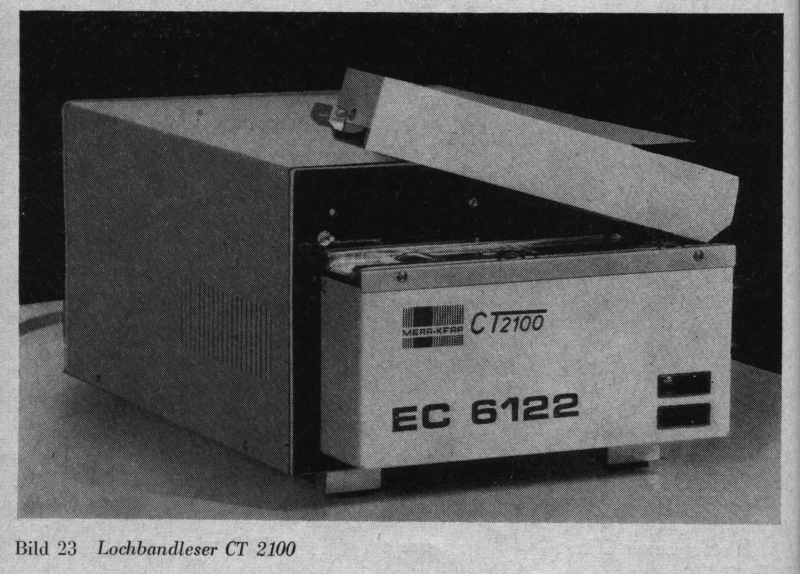
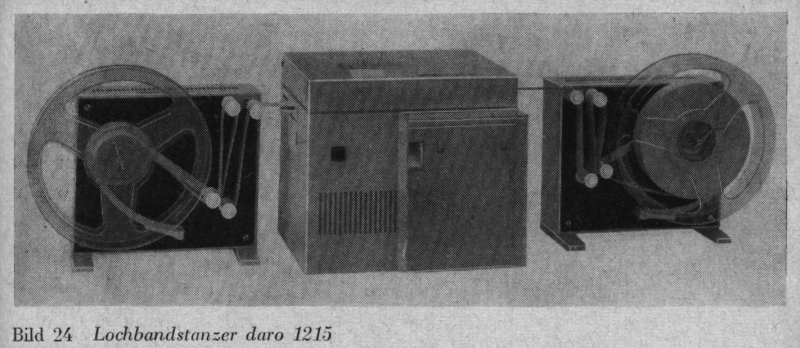
-
Lochbandleser und Lochbandstanzer,
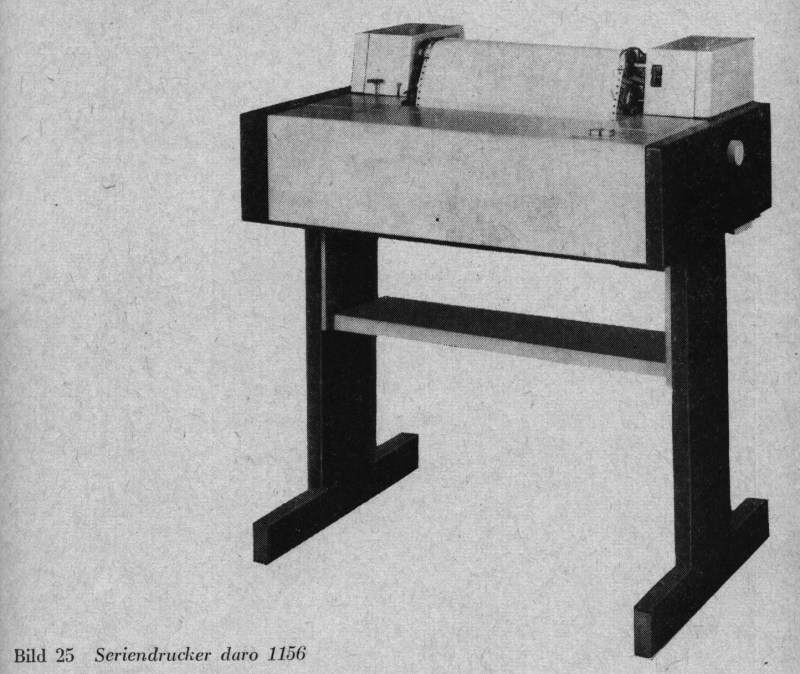
-
Seriendrucker,
-
Magnetbandkassettengeräte,
-
Magentbandeinheiten,
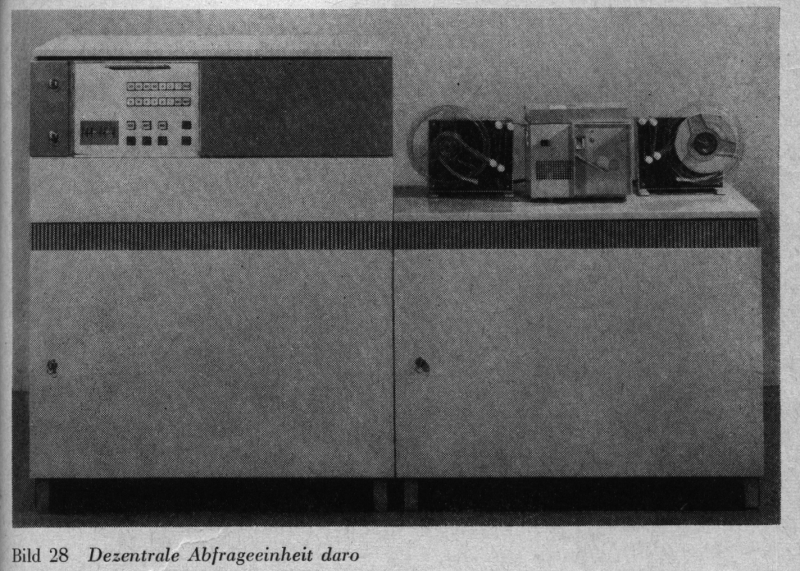
-
dezentrale Abfrageeinheiten usw.
Industrieroboter
Vom VEB Kombinat Robotron wurden mehrere Industrieroboter entwickelt und
gebaut. Hier soll auf die uns bekannten Roboter eingegangen werden.
PHM 4
Der PHM 4 (bzw. PHM 40) war ein Gelenkroboter mit 5 Freiheitsgraden
(inklusive Greiffunktion). Die Steuerung konnte in zwei Betriebszuständen
arbeiten, dem Teach-in- und Automatikbetrieb. Der Roboter besaß eine
Wiederholgenauigkeit von 0,3 mm, eine maximale Verfahrgeschwindigkeit von
0,2 bis 0,5 m/s, und seine Handhabemasse betrug max. 250g.
PHM 55
Der Montageroboter robotron PHM 55 war ein Schwenkarmroboter mit
 |
-
vier Freiheitsgraden,
-
einem Arbeitsradius von 600 mm,
-
einem Hub von bis zu 285 mm
-
und einer maximalen Handhabemasse von 1,5 kg.
|
Die Robotersteuerung gestattete neben der koordinierten Gelenkbewegung
die Bedienung umfangreicher peripherer Zu- und Abführeinrichtungen.
Die Programmierung erfolgte mit Hilfe einer übersichtlichen Fachsprache
ohne zusätzliche Programmierhilfsmittel.
Das Gerät war geeignet, Handhabe- und Montageaufgaben mit hohen
Geschwindigkeits- und Genauigkeitsanforderungen zu erfüllen. Neben
einem Sortiment von Standardgreifern standen Spezialgreifer für SMD-Bestückung
und für durchsteckbare Schaltkreise zur Verfügung.
ICA 700
| Der ICA 700 war ein Industriecomputer
für die Automatisierung, gebaut vom VEB Kombinat Automatisierungsanlagenbau
Berlin. Es war ein leistungsmäßig gestaffeltes und anwenderbezogenes
Gerätesystem mit einem 16-Bit-Mikroprozessorsystem und modularen Baugruppen
für die Prozeßautomatisierung.
Verfügbar waren zwei Varianten
-
ICA 710.20 in einem Industrieschrankgehäuse und
-
ICA 710.30 in Tischausführung .
|
 |
|
|